Robotic massage |
||
| Main | News | Materials & articles | Video | Our proposals | Contacts | ||||||||||||
|
Main News Materials & articles Video Our Proposals Contacts 
|
||
|
V. Golovin MOSCOW STATE INDUSTRIAL UNIVERSITY ABSTRACT. This paper describes some problems connected with robot-masseur design and control.Comparing to the other apparatus for massage the robot-masseur is a universal automated system which allows to perform a variety of classic and oriental massage movements. Its main feature is the possibility to control the interaction force between the robot and patient�s body. The robot-masseur control is considered. For the experiments an industrial robot PM - 01 with some supplements was used as a variant available for robot-masseur realization. KEY WORDS: Robot-masseur, force sensor, force control, mechanical interaction, muscular tissue, industrial robot , software for massage, finger-tool. 1.INTRODUCTION The massage in medicine is determined as a set of ways of dosed influence which are executed on a human body surface by rubbing, pressure or vibration. It may be done by hands directly as well as by special apparatus through air, water, etc. In any case massage has reflector action, so it is able to harmonize general physical and psychological human state as well as to cure. There are hygienic, therapy, sport, segment-reflective, cosmetic, erotic apparatus massages and self massage. Massage is a hard and monotonous procedure for the masseur, therefore various apparatus have been used for a long time. Well known devices are vibrators, vacuum heads, imitators of needle-therapy, massage couches, chairs with wavelike moving rollers or pseudoboiling plastic layers ( Dubrovsky et all., 1993). These devices ease the work of a masseur to a certain extend only, they cannot realize complicated techniques, but manipulation systems can. There is a necessity to formalize a massage procedure for the robot-masseur design. According to the control theory massage can be determined as mechanic influence of masseur tool on the patient�s body surface. This mechanical influence can be described by a force- torque vector ( F, M )�, where ( )� is a symbol of transposition. The position and orientation of the tool can be described by a ( X,� )� vector. The influence causes the change of the state vector Y= ( G,H,R )� according to purpose J( Y ) � E, where J( Y ) is a functional, the value of which are determined on multitude E. The values G, H, R characterize physical state of a body area subjected to massage, chemical structure and reflective action respectively. For example, vector G = ( T, P, Q, R, K, f, � )� describes the following physical values: temperature, pressure, liquid consumption, resistance, coefficients of elasticity, friction, viscosity. Nowadays medicine has no data to design a massage purpose function of a definite type, while the influence of some massage parameters on the patient�s state is known. In hand on or apparatus, massage practice the massage purpose is composed intuitively according to the patient�s reaction or friction and elasticity forces from massage area which influences massage hand. 2. The bionic approach in robot-masseur design The design process of robot-masseur causes some problems like those existing in industrial robotic systems and problems related with biological nature of a manipulation subject, i.e. a human organism. On the initial stages of design the bionic approach is offered when a robot actually imitates human masseur and his passes. Robot design consists of the following: manipulator kinematics, drives, information system, software. The first bionic requirement is that robot-masseur hand is supposed to be anthropomorphic and similar to a human hand by size. As generally massage is carried on a lying patient the kinematic scheme of robot-masseur should be a cylindrical angular system with the cylinder axis oriented along the patient�s body. The main information for a human masseur is tactile and force-torque one, therefore robot-masseur should have a similar information system and should include a six component sensor in a common case. Robot-masseur reproduces program paths with required forces. The data for program and adaptation control can be obtained through analysis of masseur�s hand movement and its interaction with patient�s body. The bionic approach assumes the organization of interaction between the operator and the robot-masseur. It looks like an interaction between a masseur and a patient. In this case the robot-masseur is able to carry out some massage motions with operator control. At the same time the operator does more responsible massage work. Joint work of robot-masseur and operator with patient is necessary for regime of robot training to individual patient�s geometry and elasticity. A way of force influence transmission from robot to a patient�s body is very important for a force control system design. Actual force influence should be equal to the programmed one despite of the robot�s and patient�s body mutual location, patient�s body geometry deviation and elasticity. Since the drives of a manipulator have some delay the robot should have some compliance resource just like the nature has created the springs-extremities for animals. Since the manipulation subject is a human organism, the robot-masseur should have maximum reliability and a safety system. Also, the purpose function of robot-masseur should adequately estimate patient�s biological state criteria, while for a human masseur a most significant criteria is power consumption. 3.Interaction mechanics of masseur hand with patient�s body It is necessary to have a mathematical model of interaction of masseur hand with patient�s body to control a robot-masseur. We will consider mechanic integration only to use terminology and methods of theoretic mechanics with no reference to bioenergetic interaction problem. The force influence of robot drives and reactive influences of patient�s body are presented by a coordinate system conveniently connected with robot�s tool. This is the coordinate system ( x, y, z ), where the axis z directs along the tool axis. Then the force-torque influence of the finger-tool on the patient�s body can be described by vector ( F, M )� = ( Fx , Fy , Fz , Mx ,My , Mz )� . In some control tasks it is necessary to introduce force-torque vector in coordinate system connected with manipulator subject. This is the vector ( F0 ,M0 )� . Then ( F0 ,M0 )� = A ( F , M )�, where A - is the matrix which describes some linear transformations (Formal�sky et all., 1994).
A component of the vector ( F , M )� for the press model is shown in Fig. 1. There is a protruding hillock in the figure. That means that in front of a moving finger the body part is compressed and behind the finger it is stretched. As mass and inertia momentum of a finger-tool are very slight, the inertia forces are very slight also, therefore the vector of reactive force-torque ( Fr, Mr )� will be equal to the vector of active force-torque approximately. Let us consider separate components of the vector ( Fr, Mr )�. Usually the tool is located at 90� to the patient�s body, so the force FZr can be considered as a normal component. The force FZr may serve as an example of a singular component for shiatsu-massage. This force is caused by elasticity of the patient�s body and it is a function of the deformation z. Fzr = f ( z ). The function f is nonlinear and depends on the point of influence application as well as the time. Experimental investigation was carried out on different areas of patient�s muscles and different work surfaces of tools. The disk tool pressed on the body perpendicularly, and the force Fz and the deformation z were measured. The curves averaged of the multitude of repetitions are shown in the Fig.2. The diameter of the disk-tool was 45mm. Curve 1 corresponds to a tense hip, curve 2 - a relaxed hip, curve 3 - relaxed nates. There are two vertical asymptotes in the figure. These curves correspond to maximal deformation of the flesh, when elastic tissue is deformed down to the bone. There are some pieces of curves which can be approximated as straight lines with proportionality coefficient Ke. Ke = Fz / z, where Ke is elasticity coefficient. In stroking or friction massage the tool moves along the patient�s body. The drives provide the force F in the direction of the velocity vector V. F = Fx + Fy. F is tangential component and depends on elasticity and friction forces. There is hysteresis in the function F = f ( verage experimental curves for a relaxed dry hip and sphere tool of 20mm diameter is shown in Fig.3.
The elasticity force determines the slanted parts with elasticity coefficient K. K = F / . The maximum value of K depends on friction force of a tool with a body surface, therefore it depends on the normal component Fz and is determined by friction coefficient f. f = F / Fz. Two curves for dry and oily hip are shown in Fig.4.The curves Mx = fx ( x ), My = fy ( y ), Mz = fz ( Z ), where x, y, z are rotation angles for axis x, y, z respectively, look like curves F = f ( About a half of massage techniques are performed by press. There is stroking, friction and shiatsu-massage. The other half of massage types is performed by stretching. There is pincement, ordinary knead, double ring, double griffin kind of massage. A piece of flesh is gripped then stretched from the body surface. The model of stretching types is shown in Fig. 5. Firstly, fingers press the body Fz > 0, then grip a piece of flesh with force Fg , then stretch this part Fz < 0.In some cases after that stretching a piece of flesh is turned with the torque Mz. Muscular tissue has fibrous structure with definite elastic-viscous properties. It is necessary to mention that muscular tissue strength differs from a well-known value for metals and construction materials in the theory of strength of materials. Firstly, the deformation of muscular tissue is in there range of units and tens of millimeters while metal constructions deformation is within thousandths and hundredths of millimeters. In the theory of strength of materials a slight deformation allows the infinitesimal method to be used. Loading character of muscular tissue is very specific too. Its feature is the press of muscular tissue down to the bone during deep massage or tension and compression up to the slippage in tangential direction. The paths of finger-tool movements are very diverse. The most simple movement is press on patient�s body. For shiatsu-massage the periodical presses are the single type movements. The periodicity of those movements is 1 - 7s, press time is 0,5 - 3s. Massage forces depend on the thickness and elasticity of the tissue and can reach 5 - 70N. Force should not be painful for patient, but it should be hard enough to deform tissue in all depth down to the bone. The oscillogram of real forces Fz for finger-pressure massage of a sole by a sphere tool of 20mm diameter is shown in Fig.6.
All the massage movements have periodical character. During tonic massage they are faster, their velocity is up to 1mps, their period is 1 - 3s. During sedative massage the velocity is 0,01 - 0,1mps,the period is 2 - 7s. During caring touches the force Fz can have the order of 0,01N, and during deep massage of big muscles by hands Fz reaches 100N and by feet Fz - 500N. 4.The robot - massage control Robot-masseur should measure six components of vector ( F , M )� to provide a variety of space paths and force interactions. Nevertheless, to some applying massage methods it is enough to measure only one component. For example one component of Fz is enough for massage methods by press on patient�s body point. The majority of massage movements with some loss of re- production quality can be performed by control Fz only. Hover, controlling Fz only it is impossible to go round the hillock or go out of the pit. It becomes possible by adding the control of components Fx and Fy or F . The reproduction quality is increased when those components are controlled. To control rotate movement for example during an ordinary massage a torque component Mz should be measured. The physiological patient�s reaction is the main subject estimate of massage. The pulse pressure, heartbeat frequency, muscular temperature can serve as a function of those parameters. The estimation of reproduction of path, velocity, force in comparison to human hand is the other approach. There are numeral values of error of tracking of every component of vector ( X, � )�, ( F , M )�. The specific feature of massage estimation lies in the fact that negative real force Fz < 0 during press causes loss of contact with patient�s body and discomfort senses but it is more inconvenient to exceed a set force. Often the condition ( Fs , Ms )� = constant can be a law of force setting. For small forces Fz < 0,1 N the exceeding of set force is an estimation of �tenderness�. For great forces the exceeding of set force is not a loss of quality and comfort, as there are types of pulse massage. The value of set force is essential. It can be measured in hand massage. Let us look at Fig. 2. It is possible to see the force Fz corresponding to the point near a maximum deformation for example F (0,9 ). So F= F (0,9 ) will be a goal of control. The constructive feature of sensors for massage is their great compliance. For measuring components Fz the sensor compliance can reach 20 - 30mm providing smoothing of body relief and elasticity deviations. To provide fast approach of finger-tool to patient�s body it is necessary to foresee the contact moment with the body. Best sensor can be contactless, for example infrared one. In terms of theoretical mechanics the space movement of finger-tool about a patient�s body can be considered as one in elastic-viscous medium along constrains. This movement control can be designed as superposition of two movements. The first movement is performed in the direction to constrain by force control, the second one - along the constrain by position control. This approach is used for the fitting and assembly operations for insertion of peg into a hole in particular. For massage bone skeleton of patient is the constrain and the movement to the constrain should be directed along the tool axis Z. There are point - to - point , continuous - path, force control and their combinations in control theory (Shahinpoor et all., 1990). Point - to - point and continuous - path controls do not use the measuring of the force but they can provide set forces by means of calculations of force interactions of tool and patient�s body. In the other case the path should pass across the points which were generated by training previously. This regime is possible for the majority of massage techniques. The finger-tool moves normally to body surface from previously trained point located near the body surface. Then finger-tool deforms the body and operator writes in robot memory coordinates of the point in moment when the set force is reached. The recorded points are connected by an interpolated curve and this curve is reproduced by robot drives. The set force Fz in path points will be provided for small velocity of tool. So the points can be obtained by calculation , training and self - training as well. In self - training regime the robot defines more precisely the previously trained points automatically. The force control is realized by measuring force - torque vector. To control only one component for example Fz the control signal can be represented by different function of set force Fzs , real force Fz and velocity dz / dt. For example there are linear , linear with satiation and on - off functions. To realize force control for massage two classes of systems are possible. All the drives of the first system class take part in movement along the axis by control of force Fz . In the second case the force Fz is provided by separate force device mounted on the flange of the last manipulator link. The structure schemes of pneumatic and electromechanical force devices are shown in Fig. 7. All the three systems have force feed back from force sensor. The set force Fzs is input signal for every system. The second system class has the advantage in terms of closed-loop stability.
The drives which are shown in Fig. 7 used without closed-loop by force sensor can carry out function of passive compliance like mechanical spring. The mechanical spring has simple construction but it has unchangeable elasticity unlike pneumatic and electromechanical devices.
Force-position control (force-continuous path) can be separate or joint one. For separate control, the force control is carried out first. Then point - to - point control is carried out. This control is simpler for realization than joint one but it causes more force errors. For example during stroking - massage first the press is carried out by control of force Fz , then movement is carried out along axis z by point - to - point (or continuous path) control. This control should be carried out on a little part of the path and intends perpendicularity to this part and axis z. In case of deviation the greatest reactive forces can be caused. Therefore separate control can be adequate for massage of sufficient plan area of patient�s body. For joint force-position (or force-continuous path) control every new point should be calculated by force control in 0,01s approximately. This control provides good quality of massage movements especially in the case of force-continuous path control but it requires great computer capacity and complicated software. Robot massage is carried out on relaxed and motionless patient�s body which is not hypnotized and not fixed. That is why an adaptive system is necessary which should consider slight changes of patient and size differences of various patients. There are the following ideas: 1.Tool axis deviation can be compensated by force control. 2.Points trained on a nominal patient�s points can be ranged for a certain subject just like in the �tsoun� theory. 3.To check self-training points as often as possible. 4.To train the robot in accordance with check points, for example prominent vertebra, navel.
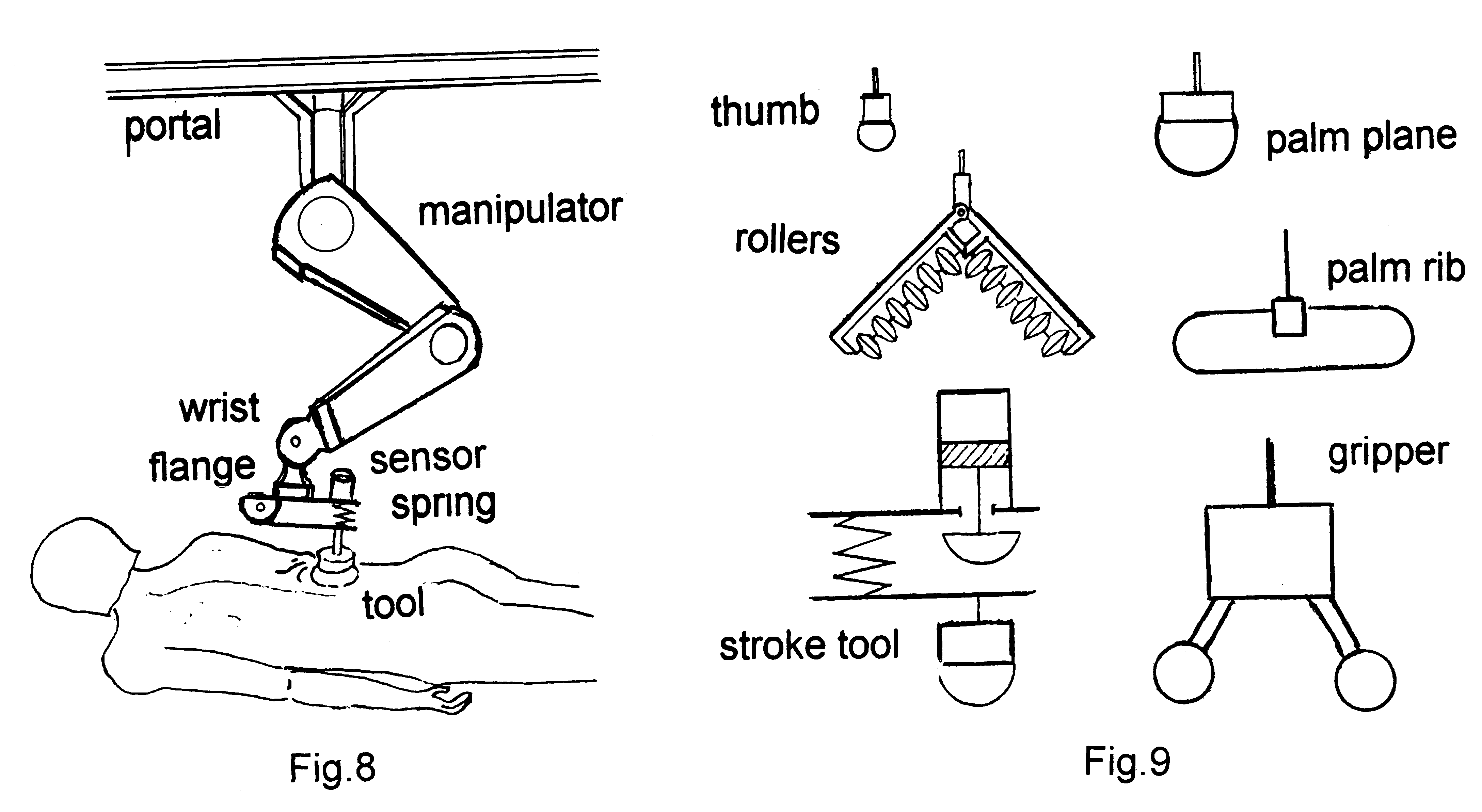
5.Industrial robot PM-01 for massage Industrial robot PM-01 is the Russian version of American robot PUMA (Programming Universal Manipulator for Assembly). It is design for an assembly that is the most complicated technology operation for automatic realization. The electrically-driven industrial robot PM-01 has the anthropomorphic manipulator with six degrees of motion and works in an angular coordinate system. Its range of movements is similar to that of a human being. Provided by the robot the force does not exceed 60N, maximum path velocity is 1 mps, position tolerance is 0,1 mm. The robot software is a small operational real time system. The applied programming language is ARPS ( Advanced Robot Programming System ). The mechanics and software of robot PM - 01 are convenient to use it as a simple variant of robot-masseur. Advanced robot PM - 01 which was used in experiments for massage with models and patients is shown in Fig. 8. The industrial robot PM - 01 was supplemented by some devices. A manipulator base is mounted on the portal. The special changeable tool was designed for imitation of a human finger or other hand parts. It is mounted to manipulator flange through elastic element. The tools for massage are shown in Fig. 9. They are imitators of the following hand�s parts: thumb, palm rib, palm plane, thumb and index fingers which grip body. Moreover there are some more tools: rollers, stroke tool. For the force control of component Fz, the advanced robot has analog sensor on the basis of induction coil. The sensor is connected to the robot input module by means of a special designed interface. For passive compliance, robot is provided with a mechanical cylindrical spring which is fixed to the flange of the manipulator. This spring is compressed by maximum force 60N with deformation 20mm. The majority of massage investigations connected with advanced robot PM-01 where processed in ARPS system while some of them were done in Assembler. The ARPS system is not oriented to massage. In this case the only type of control can be the force one by Fz or point - to - point (continuous path) control by the previously trained points or separate force point - to - point (continuous path) control. Advanced robot PM - 01 was used in experimental investigations to obtain characteristics of interaction of finger-tool and patient�s body first. A path of those investigations was considered in clause 3. Secondly, the following programs for reproduction of masseur hand movements were designed: foot, collar, back. Program FOOT serves right and left foot of any size. Command SCALE controls the adaptation to any size. Three zones on the sole and external sides are served. Each zone has 15 points approximately. Each point can be orientated at any angle about the foot. The patient sits down on a chair and lifts his feet on the stand which fixes feet from movements when the tool press on them. The program begins from the point in center of thumb ball of sitting patient which has been taught by the operator. Then the adaptation to size of nominal patient is realized by command SCALE. After that operator can initiate the following programs: - fast inspection through the new points near the foot, - press at point with set force, - circular kneading about the points with set velocities and rotation radiuses, - touch knead in any direction. Program BACK realizes the group of massage methods: stroking, deep stroking, kneading, friction, pincement, stroke methods on the back of a patient. Program COLLAR is carried out in area of nape and shoulders. These program are being healthy but tired of PC work, reading and listening teachers and students. Robot massage does not cause discomfort senses and surprises by novelty and great length of operation. Detailed biomedical investigations with physicians is being prepared. 6.Conclusion At the very first stages of working with the advanced robot PM- 01 the author met with problems, the solution of which directly depended on financial investments. 1.Reliability and safety at the initial stages are similar to those of the first railway trips. 2.Biomedical close-loop control. 3.Range of application: all the possible massage types and some completely new, possible only with the robots; it is not reasonable to try to realize palpation for diagnosis using a robot; it is possible to combine the robot-masseur and human masseur. 4.Economic aspects and prospective plans. Some definite massage background should be accepted: it is natural, it has been used since times immemorial, it is normally pleasant, often sexual. There is always a lack of massage. Not many people can afford time and money for a long and regular course of massage. There is never too much massage. Possible mistakes are not fatal, there is no invasion, it does not have a radical character. Taking into consideration all the above said, robot massage can be successfully applied for: physically and intellectually fatigued people ( PC users, scientists, business people and other categories of office employers, people who are lazy to do sports, senior people). Robot massage can be competitive to traditional one if it is much cheaper. It may be possible only due to a wide application of a main robot�s advantages: to work all day long without pauses and fatigue life limit. Such wide application will be possible when robot�s massage is realized in every bystrocafe, blocks of flats, underground, like public phones for example. A special robot-masseur should be cheaper than advanced robot PM - 01. This robot should work in cylindrical angular coordinate system. Positional error can be increased up to 1 mm. The control system should be based on a PC. Software should be oriented to massage. Unlike the well-known apparatus for massage the robot-masseur, being a universal system, can develop its capabilities �stealing� secrets from professional masseurs. 7.Acknowlegement
8.References
|
||