Роботный массаж |
||
| Главная | Новости | Материалы и статьи | Видео | Наши предложения | Контакты | ||||||||||||
|
Главная Новости Материалы и статьи Видео Наши предложения Контакты 
|
||
Опубликовано: Архипов М.В., Головин В.Ф., Журавлев В.В. Мехатроника, автоматизация, управление, № 8, М., 2011, с. 42 – 50Обзор состояния робототехники в восстановительной медицине
1. Классификация медицинских роботов Чтобы систематизировать известные и возможные робототехнические системы (РТС) в медицине предложен ряд классификаций [1,2]. В качестве признаков классификации использованы следующие: инвазивность процедуры, безопасность, мобильность, эргономичность, контроль как управление или диагностика. Один из вариантов классификации, учитывающий последние достижения в медицинской робототехнике приведен на рис.1 . Основные три класса – это роботы для восстановительной медицины, роботы для жизнеобеспечения и роботы для хирургии, терапии и диагностики. Они представляют собой основные области медицинской робототехники, хотя эти классы и их подклассы не являются независимыми по указанным выше признакам. Далее в разделах 3 – 5 рассматриваются представители обозначенных в классификации подклассов восстановительной медицины.
Рис.1
2. Концепция разработки и внедрения роботов в восстановительной медицине для здоровых людей
Восстановительная медицина представляет систему медицинской деятельности, направленной на диагностику функциональных резервов, сохранение и восстановление здоровья человека посредством оздоровления и медицинской реабилитации. Под оздоровлением следует понимать комплекс профилактических мероприятий, направленных на восстановление сниженных функциональных резервов и адаптивных возможностей организма у практически здоровых лиц [3, 4, 5, 6]. Особенную роль профилактической медицины отмечал Нобелевский лауреат И.П. Павлов (рис.2). По его словам: “Профилактическая медицина достигает своих социальных целей только в случае перехода от медицины патологии к медицине здоровья здоровых”.
Рис.2 Понятие восстановительная медицина отличается по существу от понятия медицинская реабилитация, которая представляет комплекс диагностических и лечебно-профилактических мероприятий, направленных на восстановление или компенсацию нарушенных функций организма человека и трудоспособности у больных лиц и инвалидов. Реабилитация – это закрепление лечебного эффекта в процессе выздоровления больного после болезни. В отличие от реабилитации, обеспечивающей восстановление здоровья у больного человека, восстановительная медицина направлена на воспроизводство утраченных резервов здоровья. Лечебно-оздоровительный арсенал восстановительной медицины обеспечивает человеку социально-творческую активность в своей профессии, то есть работоспособность в тех условиях, в которых протекает его профессиональная деятельность. Реабилитация по преимуществу сосредоточена на органной патологии, и соответственно её критериальный аппарат оценивает степень возвращения к норме. Методический инструментарий восстановительной медицины перенацеливается с поиска симптомов болезни на оценку резервных функциональных возможностей организма, именно к тем нагрузкам, условиям труда, в которых работает человек. В основу концепции развития здравоохранения и медицинской науки в Российской Федерации на период до 2010 г. положена здоровьецентрическая модель системы здравоохранения, разработанная РНЦВМиК под руководством академика А.Н.Разумова (рис.3). Суть модели состоит в акценте на сохранение здоровья здорового человека а, следовательно, на восстановительную медицину [7].
Рис.3 В дальнейшем большинство исследований этой монографии будет связано с контингентом не только травмированных в военных действиях, на производстве, в спорте людей, больных детским церебральным параличом, постинсультных больных, но и людей здоровых, устающих от физической и умственной деятельности, снижающих свою работоспособность. Например, преподаватели и студенты университетов. Уместно сказать здесь о развивающейся в настоящее время системе интенсивного информатизированного обучения, которая для повышения эффективности обучения предполагает концентрацию усилий как обучающихся, так и преподавателей без ущерба их здоровья. Для них необходимой является рассматриваемая в монографии восстановительная медицина. Восстановительная медицина включает ряд терапий, в том числе, немедикоментозные, одним из видов которых является механотерапия. Среди множества известных средств механотерапии наибольшими возможностями обладает робототехника. О необходимости применения аппаратных средств оздоровительного массажа именно для здоровых людей писал в своей диссертации “Материалы к вопросу о действии массажа на здоровых людей” в 1882 г русский учёный Н.В. Заблудовский [8] (рис.4). “Нельзя ли воспользоваться усовершенствованиями механики для устройства таких машин, которые заменили бы действия рук, или не будет ли даже действие машин предпочтительнее действия рук? Стоило бы изобрести машину, силу которой можно было бы в каждый момент определять в цифрах и вместо работы массёра, зависящей от субъективного мышечного чувства, иметь дело с работой, выраженной в цифрах. Другими словами – вместо того, чтобы количество целебного средства взять на глазок, взвешивать его на точных весах”.
Рис.4 В те времена это было фантастикой, и учёный лишь мечтал о возможности дозирования воздействий на аппаратных средствах будущего. В настоящее время мечты великого предсказателя могут быть реализованы при обращении к развитой адаптивной интеллектуальной робототехнике. Проблема для медицины, в первую очередь, состоит в развитии концепции Н.В. Заблудовского о новом подходе к физической культуре человека с участием не только волевых и пассивных движений, но и массажа. Массаж может иметь как функцию релаксации, так и мобилизации. В оптимальном объединении этих функций физическая культура сможет в большей степени способствовать сохранению и повышению запасов здоровья и повышению работоспособности в физическом и умственном труде. Поэтому существом концепции разработки и внедрения роботов в ВМ для здоровых людей является использование адаптивных и интеллектуальных роботов в сочетании с другими видами терапий: аромо-, мело-, психотерапией для сохранения повышения запасов здоровья людей, повышения их работоспособности. Конечно, робототехническая система является автоматизированным средством, лишь временно работая автоматически, подчиняясь человеку на уровне принятия сложных решений и являясь разумным, а не только физическим помощником. В соответствии с классификацией, предложенной выше, проведен обзор состояния робототехники для восстановительной медицины по трём направлениям: манипуляции на суставах или движения конечностей в суставах; манипуляции на мягких тканях, т.е. разнообразный массаж; активные и биоуправляемые протезы.
3. Роботы для выполнения движений конечностей в суставах Движения конечностей в суставах руками врача широко используются в спортивной, восстановительной медицине, в лечении и обучении пациентов с последствиями инсульта, детского церебрального паралича. Пассивные и активные движения конечностей в суставах часто выполняются вместе с массажем, в том числе, и в оздоровительных целях. Механотерапия заменяет руки врача руками манипулятора. Одни из первых работ, в которых был предложен манипуляционный шестиприводной робот для массажа и движения конечностей в суставах появились в 1997г. [9]. Позднее появляются одноприводные роботы американской фирмы ”Biodex”[10], швейцарской фирмы “Con-Trex”и четырёхприводной робот швейцарской фирмы “Lokomat” [11]. Робот швейцарской фирмы “Lokomat” является наиболее ярким представителем подкласса реабилитационных роботов для выполнения движений конечностей в бедренных, коленных и голеностопных суставах. Существует концепция нейропластичности, которая предполагает "постановку задачи специфического обучения" и заключается в том, что с помощью многократно повторяющихся тренировок можно улучшить повседневную двигательную активность у пациентов с неврологическими нарушениями. Роботизированная терапия на комплексе Lokomat отвечает вышеописанным требованиям и дает возможность проведения интенсивной локомоторной терапии с обратной связью. Общий вид комплекса представлен на рис. 5.
Рис. 5 Lokomat состоит из четырёх приводов для навязывания движений ходьбы и системы разгрузки веса пациента и беговой дорожки. Пациенты,
находящиеся в инвалидном кресле, могут
быть без особого Усиленная мотивация пациента осуществляется за счет управления нагрузкой с помощью биологической обратной связи при выводе текущего состояния на монитор (рис. 6).
Рис. 6 Для задач ортопедии (взрослая и детская), спортивной медицины, производственной реабилитации, профилактики и лечения остеоартритов известен робот американской фирмы “Biodex”. Принцип действия основан на электронной динамометрии. Система обеспечивает быструю и точную диагностику, лечение и документирование нарушений, являющихся причиной функциональных расстройств мышц и суставов. Система позволяет проводить мобилизацию суставов в направлении сгибание / разгибание, отведение / приведение и ротация, что необходимо для полноценного восстановления их утраченных функций. В комплектацию входит набор приспособлений для работы с тазобедренным, коленным, плечевым и локтевым суставами, а также с голеностопом и запястьем. Общий вид системы, работающей с верхними и нижними конечностями, представлен на рис. 7.
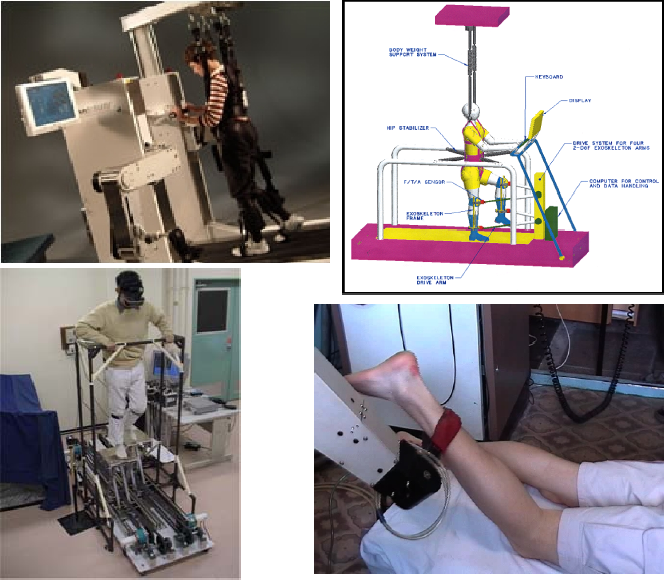
Рис. 7 Роботы для восстановления верхних и нижних конечностей были представлены на симпозиуме по медицинской робототехнике в Пенсильвании [12, 13]. На рис.8 слева: манипулятор GENTLE/s, разработка University of Reading, Великобритания; в центре: манипулятор ARMguide, разработка Rehabilitation Institute of Chicago; справа: манипулятор Manipulandum, разработка Rehabilitation Institute of Chicago.
Рис.8 Манипуляторы для восстановления верхних конечностей На рис.9 вверху слева: робот AutoAmbulator, разработка HealthSouth, США; вверху справа: тренажёр для ходьбы, разработка University of California, США); внизу слева: робот GaitMaster2, разработка University of Tsukuba, Япония); внизу справа: робот для движений конечностей, а также для массажа, разработка Российской Академии Наук) подробно описанная ниже. Рис.9 Роботы для восстановления суставов нижних конечностей Воздействия с помощью рассмотренных выше роботов относят к механотерапии. Механотерапия - метод лечебной физкультуры, основанный на выполнении дозированных движений (преимущественно для отдельных сегментов конечностей), выполняемых с помощью специальных приспособлений. Механотерапия применяется в качестве восстановительного лечения при различных двигательных расстройствах, когда необходимо увеличить амплитуду движений в суставах и силу определенных мышечных групп. На некоторых аппаратах можно заниматься сразу после оперативного вмешательства. Выбор движений, выполняемых на механотерапевтических аппаратах, определяется характером ограничения движений и анатомическими особенностями сустава.
История появления роботов в ВМ для массажа такова. В 1997 г. на втором форуме IARP по медицинской робототехнике была представлена только одна работа с использованием робототехники для восстановительной медицины – робот для массажа [9]. В 2002 г. на сайте голландской фирмы появился робот для массажа Tickle - щекочущая букашка. В 2003 г. появился российский патент – робот для шлейф-массажа [14]. В 2005 г. на сайте Силиконовой долины появилось сообщение [15] об использовании робота Puma для массажа. За основу этого робота была взята идея, изложенная в российской работе [16]. К сожалению, развитие этой разработки неизвестно. Перечисленные выше работы представляют большинство известных роботов для массажа, если не иметь ввиду многочисленных аппаратных средства для массажа. Разнообразные аппаратные средства издавна применяются для облегчения труда массажиста, предупреждения профессиональных заболеваний кистей его рук. Простейшие из них: вибраторы, роллеры, насадки для акупунктуры и акупрессуры представляют средства механизации, которые перемещает массажист (рис. 10).
Рис.10. Аппаратные средства восстановительной медицины
Следует заметить, что робот может быть носителем упомянутых аппаратных средств. Более сложными являются средства автоматизации, например, массажные кресла. Массажные кресла (рис.11) в качестве актуаторов имеют воздушные подушки с регулируемым давлением, ролики с управляемыми усилиями прижатия. Зоны воздействия массажа: шейно-плечевой отдел, спина, поясничный отдел, ягодицы, бёдра, голени, ступни. Виды массажа: разминающий, похлопывающий, поколачивающий, вибрационный, Шиатсу. С пульта управления можно установить желаемый уровень интенсивности массажа.
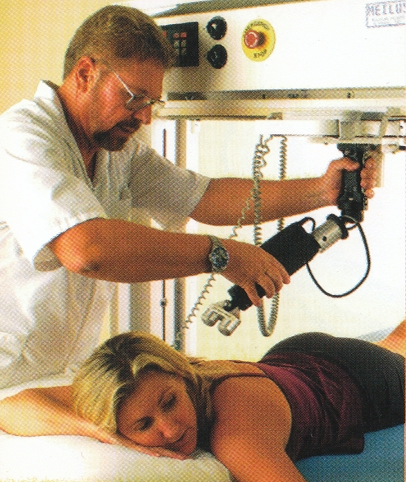
Рис.11 Пользуются популярностью полуавтоматические аппаратные средства массажа, частично разгружающие массажиста. На рис.12 показана рука производства американской фирмы Meilis, помогающая выполнять прижимные приёмы.
Рис.12 Робот голландской фирмы Tickle весьма прост по конструкции (рис. 13). В металлическом корпусе находятся два электромотора, аккумуляторная батарея и четыре датчика, позволяющих следить за наклоном поверхности, по которой передвигается робот-массажист. Движение осуществляется с помощью двух силиконовых "гусениц", покрытых выступами, создающими массажный эффект. Принцип движения робота напоминает принцип движения танка: каждый из моторов приводит в движение свою гусеницу. Воздействия робота – поглаживающие и щекочушие, вызывающие эффект релаксации.
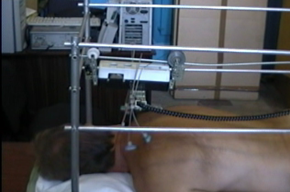
Рис.13 Робот для шлейф-массажа выполняет плоскостное, непрерывное, прямолинейное поглаживание на больших поверхностях тела (спина, грудь, живот, конечности). Такого рода поверхностное поглаживание отличается особо нежными и легкими движениями, оказывающими успокоительное воздействие на нервную систему, вызывает мышечное расслабление и улучшение кровообращения. Конструкция робота представляет каретку с электродвигателем, перемещающеюся по траверсе вдоль тела пациента (рис.14). Траверса профилирована по рельефу задней поверхности номинального пациента и не может быть перепрограммирована. С каретки свешиваются поглаживающие щётки и прижимаются к пациенту упругими пластинками.
Рис.14
В 2007 году в Японии разработан
робот для массажа лица WAO-1 (Waseda Asahi Oral
Rehabilitation Robot 1). Робот (рис.15) оснащен двумя
50-сантиметровыми механическими руками,
которые массируют лицо пациента с обеих
сторон. Безопасность обеспечивается
силометрической ограничительной
системой, которая раздвигает руки робота
в стороны, стоит ему только приложить
слишком большое усилие.
Рис. 15
Эффективность аппаратных средств массажа определяется адекватностью механического контакта с пациентом. Этот контакт осуществляется через инструмент аппаратного средства. Поэтому в техниках, воспроизводящих руки человека, инструмент должен имитировать контактные свойства человеческой руки: упругость, теплоту, влажность, фрикционные свойства (шероховатость, гладкость, скользкость), координационные возможности (многопальцевость, способность захватывать). В большей степени перечисленные свойства может обеспечить многосуставный манипуляционный робот. В Московском Государственном Индустриальном Университете разработан робот для выполнения приёмов массажа и движения конечностей в суставах [9, 16, 17,18, 19,20]. Основой этого робота является промышленный робот РМ-01, манипуляционная рука которого антропоморфна по размерам и кинематике (рис.16). В контакте с телом робот развивает усилие до 60 Н. Необходимые усилия развиваются и контролируется за счёт позиционно – силовой системы управления, расширяющей возможности штатного робота.
Рис.16 Шестиприводной робот с указанными данными может выполнять множество известных манипуляций непосредственно на мягких тканях, т.е. разнообразный массаж, а также манипуляции на суставах в виде пассивных и активных движений конечностей, постизометрической релаксации в виде сочетаний нагружений и разгрузок мышц конечностей. На рис.17 робот выполняет выжимание длинных мышц спины девочки.
Рис.17
4).
Биопротезирование верхних и нижних конечностей, утраченных в результате травм или болезни опирается на более простые решения. Некоторые простейшие решения в какой-то степени лишь эстетически восстанавливают внешность конечностей, другие решения восстанавливают некоторые функции. На рис.18 приведена классификация протезов, в которой выделены классы активных и биоуправляемых протезов.
Рис.18
Разработанные на основе теории баллистических синергий [21], протезы нижних конечностей не являются активными и не используют биосигналы, но эффективно используют упругость пружин протезов. В тяговых протезах верхних конечностей, вначале как пассивных, движения схвата кисти вызывались за счёт дополнительных движений сохранившейся части руки или за счёт движения туловища. Передающим звеном вначале были гибкие тяги, впоследствии появились активные тяговые протезы, в которых движения тяг воспроизводились встроенными двигателями. Активными, но не биоуправляемыми, являются миотонические протезы, в которых управляющими сигналами являются усилия инвалида. Датчики в виде микровыключателей или тензоэлементов измеряют эти усилия и передают на исполнительные приводы кисти. Рассмотренные способы протезирования без использования биосигналов имеют ряд недостатков. Управляющие тяги обременяют инвалида, затрудняют движения плечевого пояса, число управляющих команд так же, как при миотоническом управлении, ограничено (одна-две команды). Помехами для управления являются случайные внешние толчки в гильзу культи протеза. Тем не менее, простейшие протезы разработаны в виде модульных конструкций и выпускаются серийно [22, 23]. Развитию биоуправляемых протезов способствовали достижения в области электрофизиологии, биомеханики, микроэлектроники, адаптивных систем управления с обратными связями. В настоящее время известна немецкая фирма “Otto Bock”, серийно выпускающая пассивные и активные протезы. На рис.19 приведен активный протез коленного сустава.
Рис.19
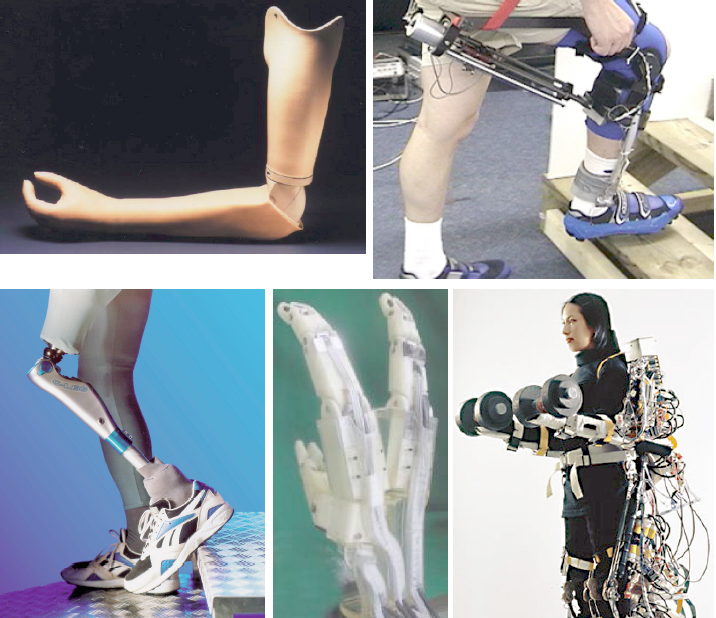
. Наиболее значительные результаты по биопротезированию в 70-80-х годах в России известны по работам ЦНИИ ПП [23]. В работах ЦНИИПП родилось принципиально новое направление в протезировании конечностей — создание протезов с биоэлектрической системой управления или биоуправляемых протезов. Сущность нового принципа построения искусственных конечностей состоит в том, что управление внешними источниками энергии, за счет которой работает протез, в своей основе подобно естественной координации движений здорового человека. В живом организме управляющие воздействия передаются мышцам посредством биоэлектрических импульсов, отражающих команды центральной нервной системы. Подобно этому в протезе руки с биоэлектрическим управлением роль командных сигналов выполняют биотоки, отводимые от усеченных мышц культи. Механизмом, исполняющим команды, является искусственная кисть, снабженная малогабаритным электрическим приводом с автономным питанием. По материалам симпозиума 2004 г. в Пенсильвании [12, 13] известны активные протезы и экзоскелетоны, приведенные на рис.20.
Рис.20 Активные протезы и экзоскелетоны
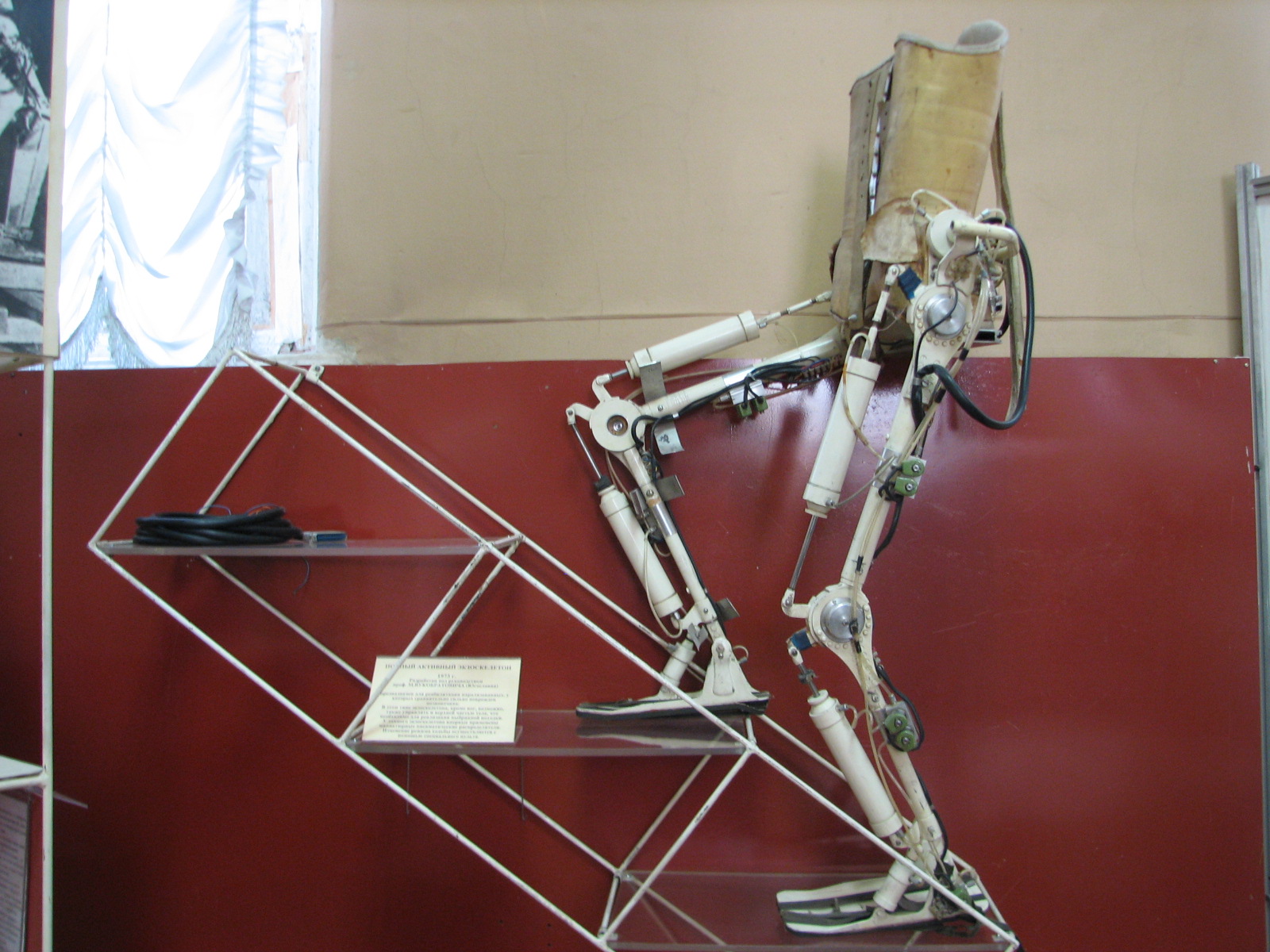
Одними из первых работ в области активных протезов и экзоскелетонов являются работы Миомира Вукобратовича [24]. Под его руководством были разработаны экзоскелетоны, в одном варианте с электрическими, в другом с пневматическими приводами тазобедренного, коленного и голеностопного суставов для обеих ног пациента ( рис.21). Экзоскелетон предназначался для усиления дистрофически слабых мышц нижних конечностей человека во время ходьбы.
Рис.21 Японская компания Matsushita разработала роботизированный костюм , который поможет реабилитации частично парализованных людей (рис.22). Когда человек, страдающий параличом на одну руку, делает движение здоровой рукой, парализованная рука делает то же самое движение, напрягая и сгибая компрессоры, которые играют роль мускулатуры. Повторяя движения здоровой руки, человек в роботизированном костюме может тренировать свою больную руку до восстановления нормального функционирования конечности.
Рис.22
Костюм весит 1,8 кг. Он был разработан совместно компанией Были проведены испытания костюма в госпитале, и планируется поставить производство на коммерческую основу. Приблизительная цена костюма для использования в реабилитационных клиниках составит 17000 долл., для домашнего использования – около 2000 долл.
Другая токийская компания
Cyberdine разработала автоматизированный
костюм H
Рис.23 Выводы 1. Судя по публикациям организаций- разработчиков и медицинских центров области применения медицинских роботов, в том числе для восстановительной медицины, расширяются и спрос на них увеличивается. 2. Медицинские роботы в сравнении другими аппаратными средствами имеют ряд преимуществ. Это – быстрая перепрограммируемость, высокая точность повторения движений, неутомимость, отсутствие субъективных факторов (добросовесность), дружественный интерфейс (психоэмоциональный контакт), партнёрство (для детей вовлечение в игры, в разнообразные движения, например, в утреннюю зарядку). Также адаптация к индивидуальным особенностям человека (позиционно-силовое управление), наличие интеллекта (накопление опыта, анализ, генерация программ), повышенная безопасность за счёт адаптации и интеллекта. 3. В сравнении с руками врача медицинские роботы сегодняшнего дня часто уступают в чувствительности и координации в сложных движениях. 4. Концепция разработки и внедрения роботов в ВМ для здоровых людей состоит в применении адаптивных и интеллектуальных роботов для сохранения и увеличения запасов здоровья населения, восстановлении работоспособности трудящихся. 5. При разработке и внедрении роботов в ВМ следует делать компромиссный выбор между многофункциональными роботами и экономичными специализированными с малым числом приводов. 6. Для разработанных аппаратных средств ВМ, включая роботы, манипулирующие на мягких тканях и суставах, активные и биоуправляемые протезы, эффективно используется тактильная и силометрическая информация, как для разомкнутых, так и для замкнутых силовых и позиционно-силовых систем управления. 7.Биоинформация используется непосредственно как управляющие сигналы, образует замкнутые системы или образует биологические обратные связи через зрение и нервную систему человека. Список литературы
|
||